N-sferă

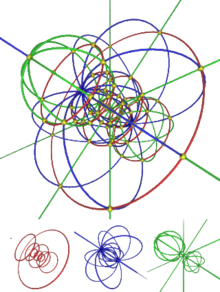
Deoarece proiecția stereografică este o transformare conformă, curbele se intersectează ortogonal (în punctele galbene) ca în spațiul cvadridimensional. Toate curbele sunt cercuri: curbele care se intersectează 〈0,0,0,1〉 au o rază infinită (sunt drepte).
În matematică o n-sferă este un spațiu topologic care este homeomorf cu n-sfera "standard", care este mulțimea punctelor din spațiul euclidian (n+1)-dimensional care sunt situate la o distanță constantă r de un punct fix, numit centru. Este generalizarea unei sfere obișnuite din spațiul tridimensional obișnuit. Raza unei sfere este distanța constantă a punctelor sale până la centru. Când sfera are raza egală cu o unitate, de obicei este numită n-sferă unitate, sau, pe scurt, n-sferă. În ceea ce privește norma standard, n-sfera este definită drept

iar n-sfera de rază r este definită drept

Dimensiunea unei n-sfere este n, care nu trebuie confundată cu dimensiunea (n+1) a spațiului euclidian care o conține în mod natural. O n-sferă este suprafața care mărginește o bilă (n+1)-dimensională.
În particular:
- perechea de puncte de la capetele unui segment (unidimensional) este o 0-sferă,
- un cerc, care este circumferința unidimensională a unui disc bidimensional, este o 1-sferă,
- suprafața bidimensională a unei bile tridimensionale este o 2-sferă, numită uzual sferă,
- frontiera tridimensională a unei 4-bile (cvadridimensională) este o 3-sferă,
- frontiera n–1-dimensională a unei n-bile (n-dimensională) este o (n–1)-sferă.
Pentru n ≥ 2 n-sferele, care sunt varietăți diferențiabile(d), pot fi caracterizate (până la un difeomorfism) ca fiind varietăți n-dimensionale simplu conexe, cu curbură constantă pozitivă. n-sferele admit alte câteva descrieri topologice: de exemplu, ele pot fi construite prin lipirea împreună a două spații euclidiene n-dimensionale, identificând limita unui n-cub cu un punct, sau (inductiv) prin formarea suspensiei unei (n–1)-sfere. 1-sfera este o 1-varietate care este un cerc, care nu este simplu conex. O 0-sferă este o 0-varietate formată din două puncte, care nici măcar nu sunt conexe.
Prin hipersferă se înțelege în general o n-sferă cu n > 2.
Descriere
În coordonate euclidiene din (n+1)-spațiu
Mulțimea punctelor din (n+1)-spațiu, (x1, x2, ..., xn+1) care definește o n-sferă, este dată de ecuația:


unde c = (c1, c2, ..., cn+1) este centrul, iar r este raza.
n-sfera de mai sus există în spațiul euclidian (n+1)-dimensional și este un exemplu de n-varietate. Volumul ω unei n-sfere de rază r este dat de

unde ∗ este operatorul Hodge(d) (stea); v. Flanders (1989, §6.1) pentru demonstrație în cazul r = 1. Rezultă

n-bilă
Articol principal: Bilă (matematică).
Spațiul închis de o n-sferă se numește (n+1)-bilă. O (n+1)-bilă este închisă dacă include n-sfera și este deschisă dacă nu o include.
În particular:
- o 1-bilă este un segment, interiorul unei 0-sfere,
- o 2-bilă este un disc, interiorul unui cerc (1-sferă),
- o 3-bilă este o bilă obișnuită, interiorul unei sfere (2-sferă),
- o 4-bilă este interiorul unei 3-sfere etc.
Prin hiperbilă se înțelege în general o n-bilă cu n > 2.
Descriere topologică
Topologic, o n-sferă poate fi construită ca o compactificare(d) a spațiului euclidian n-dimensional. Pe scurt, n-sfera poate fi descrisă ca Sn = ℝn ∪ {∞}, care este spațiul euclidian n-dimensional plus un singur punct care reprezintă infinitul în toate direcțiile. În particular, dacă un singur punct este înlăturat de pe o n-sferă, ea devine homeomorfă cu ℝn. Asta formează baza proiecției stereografice.[1]
Volumul și aria

Vn(R) și Sn(R) sunt volumul n-dimensional al bilei n-dimensionale, respectiv aria suprafeței n-sferei n + 1-dimensionale, de rază R.
Constantele Vn și Sn (pentru R = 1, bila și sfera unitate) sunt legate prin relațiile de recurență:
![{\displaystyle {\begin{aligned}V_{0}&=1&V_{n+1}&={\frac {S_{n}}{n+1}}\\[6pt]S_{0}&=2&S_{n+1}&=2\pi V_{n}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/08b0cb79e4c116993f6d6c1162a4031f8fa8f913)
Ariile și volumele sunt date și de relațiile:
![{\displaystyle {\begin{aligned}S_{n-1}(R)&={\frac {2\,\pi ^{\frac {n}{2}}}{\Gamma \left({\frac {n}{2}}\right)}}R^{n-1}\\[6pt]V_{n}(R)&={\frac {\pi ^{\frac {n}{2}}}{\Gamma \left({\frac {n}{2}}+1\right)}}R^{n}\end{aligned}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/64b0f5910357fa83c908487ef44cdd84bae6cefd)
unde Γ este funcția gamma.
În general, volumul n-bilei de rază R din spațiul euclidian n-dimensional și aria suprafeței n-sferei de rază R din spațiul euclidian (n+1)-dimensional sunt proporționale cu a n-a putere a razei R (cu diferite constante de proporționalitate care depind de n). Se poate scrie Vn(R) = VnRn pentru volumul n-bilei și Sn(R) = SnRn pentru aria suprafeței n-sferei, ambele de rază R, unde Vn = Vn(1) și Sn = Sn(1) sunt valorile pentru raza 1.
În teorie, se pot compara valorile Sn(R) și Sm(R) pentru n ≠ m. Totuși, acestea nu sunt bine definite. De exemplu, dacă n = 2 și m = 3 atunci comparația este de parcă s-ar compara un număr de metri pătrați cu alt număr de metri cubi. La fel la compararea Vn(R) cu Vm(R) pentru n ≠ m.
Exemple
0-bila este formată dintr-un singur punct. Dimensiunea Hausdorff este numărul de puncte al mulțimii. Prin urmare,

0-sfera este formată din două puncte de capăt, {−1,1}. Prin urmare,

1-bila unitate este intervalul [−1,1] de lungime 2. Prin urmare,

1-sfera este cercul unitate din planul euclidian, care are circumferința (1-dimensională)

Zona închisă de 1-sferă este 2-bila, sau discul unitate, care are aria (2-dimensională)

Analog, în spațiul euclidian 3-dimensional, aria suprafeței (2-dimensională) a 2-sferei este

iar volumul închis de 3-bila unitate (3-dimensională), este

Proiecția stereografică
Articol principal: Proiecție stereografică.
La fel cum o sferă bidimensională din spațiul tridimensional poate fi proiectată pe un plan bidimensional printr-o proiecție stereografică, o n-sferă poate fi proiectată pe un hiperplan n-dimensional de versiunea n-dimensională a proiecției stereografice. De exemplu, punctul [x,y,z] de pe o sferă bidimensională de rază 1corespunde punctului [x/1 − z,y/1 − z] din planul xy. Altfel spus,
![{\displaystyle [x,y,z]\mapsto \left[{\frac {x}{1-z}},{\frac {y}{1-z}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d1a0479f611a4006c342d713a525232159140474)
Analog, proiecția stereografică a unei n-sfere Sn−1 de rază 1 va fi aplicată pe hiperplanul (n−1)-dimensional ℝn−1 perpendicular pe axa xn ca
![{\displaystyle [x_{1},x_{2},\ldots ,x_{n}]\mapsto \left[{\frac {x_{1}}{1-x_{n}}},{\frac {x_{2}}{1-x_{n}}},\ldots ,{\frac {x_{n-1}}{1-x_{n}}}\right].}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9d724ec5ccaf13bd398dedce93ba71fa382b39c7)
Note
- ^ en James W. Vick (1994). Homology theory, p. 60. Springer
Bibliografie
- en Flanders, Harley (). Differential forms with applications to the physical sciences. New York: Dover Publications. ISBN 978-0-486-66169-8.
- en Moura, Eduarda; Henderson, David G. (). Experiencing geometry: on plane and sphere
 . Prentice Hall. ISBN 978-0-13-373770-7 (Chapter 20: 3-spheres and hyperbolic 3-spaces).
. Prentice Hall. ISBN 978-0-13-373770-7 (Chapter 20: 3-spheres and hyperbolic 3-spaces). - en Weeks, Jeffrey R. (). The Shape of Space: how to visualize surfaces and three-dimensional manifolds. Marcel Dekker. ISBN 978-0-8247-7437-0 (Chapter 14: The Hypersphere).
- en Marsaglia, G. (). „Choosing a Point from the Surface of a Sphere”. Annals of Mathematical Statistics. 43 (2): 645–646. doi:10.1214/aoms/1177692644.
- en Huber, Greg (). „Gamma function derivation of n-sphere volumes”. Amer. Math. Monthly. 89 (5): 301–302. doi:10.2307/2321716. JSTOR 2321716. MR 1539933.
- en Barnea, Nir (). „Hyperspherical functions with arbitrary permutational symmetry: Reverse construction”. Phys. Rev. A. 59 (2): 1135–1146. Bibcode:1999PhRvA..59.1135B. doi:10.1103/PhysRevA.59.1135.

Legături externe
 | Portal Matematică |
- en Eric W. Weisstein, Hypersphere la MathWorld.
| ||
|---|---|---|
| Spații dimensionale |
|  |
| Alte dimensiuni |
| |
| Politopuri și forme |
| |
| Dimensiuni după număr | ||
| Vezi și | ||
Categorie | ||
| Control de autoritate |
|
|---|









