Euklidinen avaruus
Euklidinen avaruus on n-ulotteinen reaalikertoiminen vektoriavaruus, jolle pätevät euklidisen geometrian aksioomat.[1] Euklidista avaruudelle käytetään merkintöjä tai .


Tunnetuin euklidinen avaruus on eli reaaliluvut. Lisäksi matematiikassa tulevat usein vastaan euklidinen taso ja kolmiulotteinen avaruus .



Nykyisen käsityksen mukaan maailmankaikkeus ei ole euklidinen avaruus, sillä suhteellisuusteorian mukaisesti avaruuden rakenne taipuu suurten massojen vaikutuksesta. Suhteellisen pienillä nopeuksilla tilannetta voi hyvin kuvata euklidisen avaruuden rakenteilla.
Johdanto
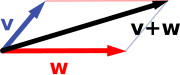 |  |
Esimerkiksi vektoriavaruuden alkioita eli vektoreita ovat reaalilukukolmikot . Kahden tällaisen summa lasketaan koordinaateittain:

- .

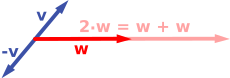
Skalaarilla eli reaaliluvulla kerrottaessa jokainen vektorin koordinaatti kerrotaan annetulla reaaliluvulla, esimerkiksi
- .

Tämä siis tuottaa skalaarista ja vektorista vektorin.
Skalaaritulossa eli pistetulossa sen sijaan lasketaan kahdesta vektorista skalaari,
- .

Tämän skalaaritulon avulla voidaan määrittää avaruuteen normi eli pituusmitta:
- .

Tämä vastaa Pythagoraan lausetta. Kahden vektorin etäisyys määritellään niiden erotuksen normiksi:

- .

Vastaavat säännöt pätevät kaikissa vektoriavaruuksissa .
Määritelmiä
Euklidinen avaruus määritellään topologisesti tuloavaruutena, eli :n karteesisena tulona itsensä kanssa n kertaa. Tuloavaruuden pisteet ovat järjestettyjä n-jonoja, eli niissä on n kappaletta alkioita. Esimerkiksi


Sen voi määritellä myös lineaarialgebran tapaan vektoriavaruutena, jolloin avaruuden kannan muodostavat n kappaletta kohtisuorasti toisiaan vastaan olevaa yksikkövektoria:




:n mielivaltainen vektori merkitään

missä reaaliluvut ovat vektorin koordinaatit. Vektori voidaan esittää myös yksikkövektoreiden avulla summana:


Lukua 0 vastaa nollavektori

Kahden :n vektorin summa on määritelty laskemalla vektorit koordinaateittain yhteen:

Vakiolla kerrottaessa jokainen vektorin koordinaateista kerrotaan erikseen:

Laskusääntöjä
Vektorin pituuden ja vektoreiden välisen kulman laskemiseksi tarvitsee määritellä pistetulo. :n vektoreille ja se on



Vektorin pituus eli euklidinen normi on neliöjuuri sen sisätulosta itsensä kanssa:

Euklidinen metriikka määrittää kahden pisteen etäisyyden euklidisessa avaruudessa. Sitä kutsutaan myös etäisyysfunktioksi, ja se on oikeastaan yksi pythagoraan lauseen muoto. Pisteille ja se on



Kulma vektoreiden ja välillä lasketaan pistetulon ja normin avulla:

Katso myös
Lähteet
- Väisälä, Jussi: Topologia I. Helsinki: Limes ry, 2002. ISBN 951-745-192-X.
- Martio, Olli: Vektorianalyysi. Helsinki: Limes ry, 2004. ISBN 951-745-205-5.
- Mendelson, Bert: Introduction to Topology. Dover Publications, 1990. (englanniksi)
Viitteet
- ↑ Kiyosi Ito: Encyclopedic Dictionary of Mathematics, s. 554. MIT Press, 1996. ISBN 9780262590204. (englanniksi)
Kirjallisuutta
- Kivelä, Simo K.: Algebra ja geometria. Espoo: Otatieto, 1989. ISBN 951-672-103-6.
- Rikkonen, Harri: Matematiikan pitkä peruskurssi I – Vektorialgebra ja analyyttinen geometria. Helsinki: Otakustantamo, 1969. ISBN 951-671-067-0.
- Pitkäranta, Juhani: Calculus Fennicus – TKK:n 1. lukuvuoden laaja matematiikka (2000–2013) (pdf) Helsinki: Avoimet oppimateriaalit ry. ISBN 978-952-7010-12-9 ISBN 978-952-7010-6 (pdf).






