Vektorový součin[1] je v matematice binární operace násobení vektorů v trojrozměrném vektorovém prostoru se skalárním součinem. Výsledkem této operace je vektor (na rozdíl od součinu skalárního, jehož výsledkem je při součinu dvou vektorů skalár) kolmý k oběma násobeným vektorům a jeho velikost je rovna obsahu rovnoběžníku sevřeného násobenými vektory.
Značení
Vektorový součin vektorů a se obvykle značí jedním z následujících způsobů:
Mějme aritmetický vektorový prostor s kanonickou bází nad číselným tělesem , pak pro vektory platí, že vektor je vektorovým součinem vektorů vzhledem k uvedené bázi, právě když:
,
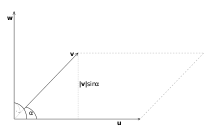
kde je úhel svíraný vektory a a kde je jednotkový vektor k nim kolmý, tj. vektorový součin je vnější součin ve třech rozměrech.
Výše uvedené jednotkové vektory existují dva v závislosti na tom, je-li souřadný systém definován jako pravotočivý nebo levotočivý. V pravotočivém souřadném systému lze použít pravidlo pravé ruky: je-li vektor znázorněn ukazovákem a vektor prostředníkem pravé ruky, přičemž ukazovák je natažený v rovině dlaně a prostředník směřuje blíže k rovině na dlaň kolmé, pak vektorový součin je ve směru palce.
Vektorový součin lze definovat také bez pomoci úhlu, který oba vektory svírají. Máme-li vektorový součin , pak složky vektoru lze určit jako:
.
S využitím vzájemně jednoznačného přiřazení třísložkových vektorů a antisymetrických matic řádu :
lze vektorový součin zavést jako komutátor dvou takových matic:
,
kde množina antisymetrických matic je vzhledem ke komutátoru uzavřená.
Vektorový součin dvou vektorů není pravý vektor, ale tzv. pseudovektor, tzn. při zrcadlení vztažné soustavy se transformuje s opačným znaménkem než pravé vektory. Chceme-li s vektorovým součinem operovat kovariantně, vyjádříme jeho složky jako prvky antisymetrického tenzoru druhého řádu:
.
Počet nezávislých složek takovéhoto antisymetrického tenzoru je roven třem pouze ve třírozměrném prostoru, proto lze provést přiřazení:
.
Toto přiřazení je speciálním případem tzv. Hodgeova duálu a umožňuje zobecnění vektorového součinu i do prostorů s dimenzí různou od 3. (Např. ve čtyřrozměrném prostoru je počet nezávislých složek antisymetrického tenzoru druhého řádu 6, takže jej již nelze vyjádřit jako pseudovektor a zobecněním vektorového součinu je pseudotenzor druhého řádu.)
Zobecnění v n-rozměrném prostoru
Podrobnější informace naleznete v článku Vnější součin.
kde značí hybnost hmotného bodu, který má polohu vůči zvolenému počátku souřadnic. Moment síly a moment hybnosti spolu úzce souvisí. Ukáže se to při pokusu o derivování momentu hybnosti podle času:
.
Zde bylo využito výše zmíněného pravidla pro derivaci vektorového součinu. Výraz je v kinematice přesná definice rychlosti tělesa. Podobně tak definuje sílu. Poslední užitá fyzikální rovnost se týká hybnosti. . Na základě těchto opisů lze derivaci momentu hybnosti upravit do tvaru:
,
kde vektorový součin dvou identických vektorů je roven nule, pak dostaneme:
.
Moment síly je tedy časová derivace momentu hybnosti. V praktickém světě se tohoto vztahu dá využít např. v orbitální mechanice. Planeta, která obíhá kolem Slunce tvořícího počátek souřadnic, má nulový moment síly, neboť gravitační síla i polohový vektor mají stejný směr. Moment hybnosti této planety se určí integrováním:
,
kde je integrační konstanta. Jinými slovy , což je pravidlo charakteristické pro 2. Keplerův zákon.
Operátor rotace
Další forma vektorového součinu důležitá pro fyziku je operátor rotace. Jedná se o diferenciální operátor, jehož aplikování na vektor má strukturu:
Rotace se vyskytuje ku příkladu v prvních dvou Maxwellových rovnicích zapsaných v diferenciálním tvaru:
.
Reference
↑BICAN, Ladislav. Linearni algebra a geometrie (upr. vydání). [s.l.]: Academia, 2009. ISBN978-80-200-1707-9.Je zde použita šablona {{Citation}} označená jako k „pouze dočasnému použití“.




![{\displaystyle [\mathbf {a} \mathbf {b} ]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e94400d0bbd41911f18240ede6c90d4fefaffdec)



































































 Obrázky, zvuky či videa k tématu vektorový součin na Wikimedia Commons
Obrázky, zvuky či videa k tématu vektorový součin na Wikimedia Commons 









